Declaring function blocks
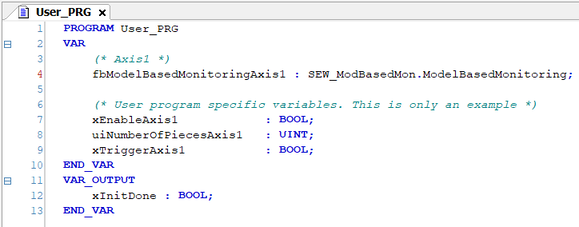
In the "User_PRG" program, declare a function block of the "ModelBasedMonitoring" type from the "SEW DriveRadar ModelBasedMonitoring" library for every MultiMotion axis for which a mathematical model is to be calculated.
MOVIKIT® ModelBasedMonitoring
Language
Deutsch
English
SEW-EURODRIVE
Home
Model calculation (MOVI-C® CONTROLLER)
Creating an IEC project
Declaring function blocks