Absolute positioning mode (400)
INFORMATION

Changes to the ramp and jerk during movement can lead to undesirable over-oscillation.
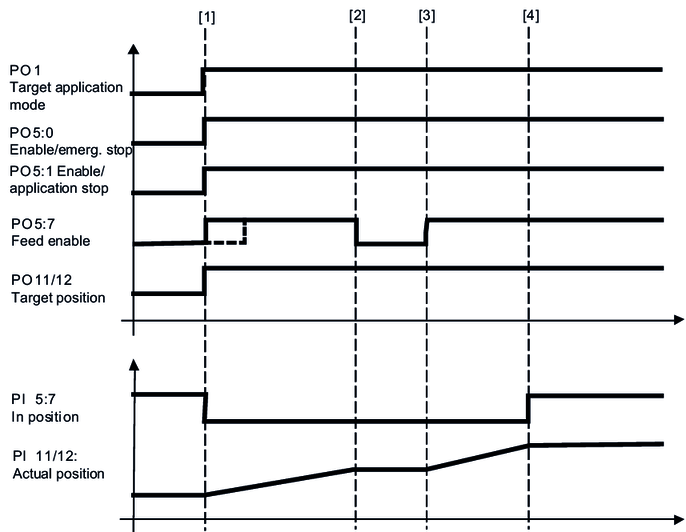
Absolute positioning of an axis with reference to machine zero (reference point). The setpoint position is processed with sign. All dynamic parameters are applied at any time (even during the stop ramp).