CARTESIAN_GANTRY_LL_M10
Included in the
MOVIKIT
®
Robotics license.
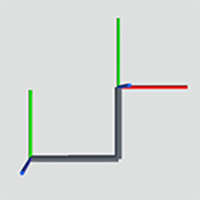
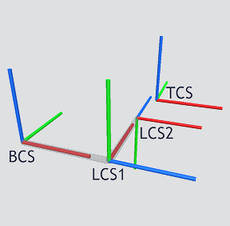
CARTESIAN GANTRY (portal) with 2 linear axes:
Joint axis 1: X direction
Joint axis 2: Y direction
MOVIKIT® Robotics
Language
Deutsch
English
SEW-EURODRIVE
Home
Functional description
Kinematic models
CARTESIAN_GANTRY_LL_M10