Koordinatensysteme
Die Pose des Roboters lässt sich über verschiedene Koordinatensysteme angeben. Dabei sind abhängig von der Lage des Koordinatensystems die Koordinaten einer Pose in jedem Koordinatensystem unterschiedlich. Beim MOVIKIT® Robotics gibt es die folgenden Koordinatensysteme:
- Base
- Koordinatensystem, das im Allgemeinen körperfest im Sockel der Kinematik positioniert ist. Es dient als Bezugskoordinatensystem für die direkte kinematische Transformation (Transformation der Gelenkachswerte in kartesische Werte des Werkzeugs).
- Joint
- Koordinatensystem, in dem jede Koordinate einer Gelenkachse des Kinematikmodells entspricht.
- User
- Koordinatensystem, das sich in der aktuellen Version der Software auf Base bezieht. Es kann statisch oder bewegt sein.
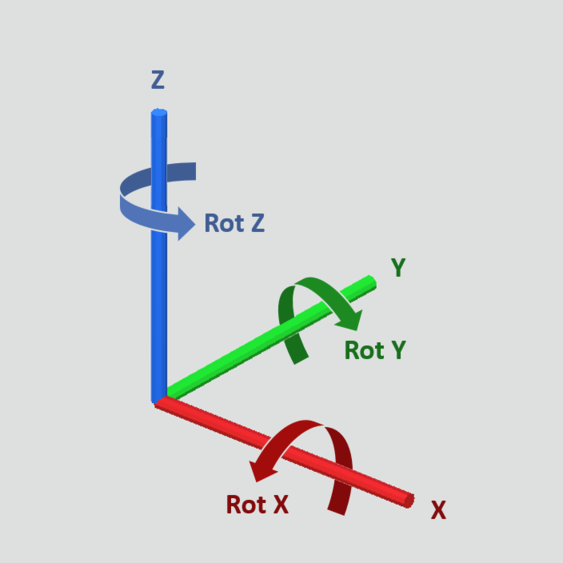
Es handelt sich um rechtshändige, kartesische Koordinatensysteme. Die X-Achse ist rot, die Y-Achse grün und die Z-Achse blau gefärbt. Drehungen um diese Achsen erfolgen in der Regel nach der rechten Hand Regel bzw. im mathematisch positiven Drehsinn.
|