Load moment of inertia and torque
It is possible to precontrol the load moment of inertia and the torque. The corresponding variables are also already connected in the process data:

The processing of these variables as precontrol values is activated by activating the parameter "Mass moment of inertia via setpoint connection":
|

INFORMATION
Only the processing of both variables as precontrol values can be activated or deactivated. For example, it is not possible to process only the mass moment of inertia as a precontrol value but not the torque.
The two variables are scaled as follows:
- Mass moment of inertia: % of the sum of the mass moment of inertia of motor and brake (parameter 8360.47) and external load moment of inertia (parameter 8484.13) set during startup with three decimal places.
- Torque precontrol: % of the nominal motor torque with one decimal place.
The two variables must be provided by a function block that implements the "ITorqueAndInertiaPrecontrol" interface:

The function block then implements the get accessories of the following properties:
- lrInertiaScale
- lrTorquePrecontrol
|
An instance of this function block is then to be switched into the setpoint flow via the LinkTorqueAndInertiaPrecontrol() method. The respective method can be requested for MultiMotion axes from version 7.xx. Following a code example:
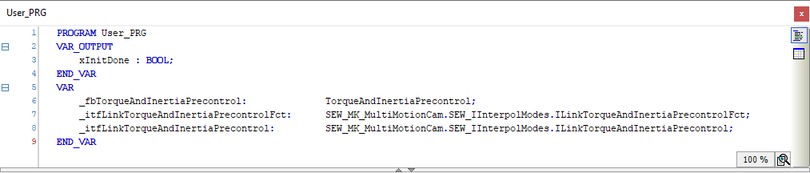

The function block "TorqueAndInertiaPrecontrol" is instantiated in the User_PRG program. The interface "ILinkTorqueAndInertiaPrecontrolFct" is requested at the "Axis1", which is then used to assign the interface "ILinkTorqueAndInertiaPrecontrol". The method LinkTorqueAndInertiaPrecontrl() can then be called at this interface and the function block can in this way be switched to the setpoint flow.
